Pimp My Ride – Lithium Cuda DPV
MISSION: Replace my dead Cuda 400 Nimh battery with a lithium solution, offering greater range and increased power.
Like many projects, this one turned out to be more work than I thought. In the end though, I’ve turned my Cuda into an 800 monster that rides smooth and hard.
The Battery
My initial attempts to purchase one of the commercially available lithium solutions all proved to be a dead ends when it came to shipping to Australia. Establishing the battery specifications was pretty straight forward, and a 12S 43.2V(12 x 3.6v) solution seems an almost perfect match for the Cuda control system in terms of max and min voltage. I also felt no need to max out the lithium content, as 830whr will give me adequate range and was a relatively simply build for the battery guys. Getting it shipped to Australia, well that’s another. Eventually I got the following pack landed in Oz for US$815 from a Chinese supplier who I’ve used with very good results in the past.
Voltage: 43.2V (50.4V fully charged) – 12S6P
Capacity: 19.2Ah / ~830whr
Cells: Panasonic NCR18650BD (10A rated)
Chemistry: Lithium ion
Protection: Balancing BMS – 45A continuous rated
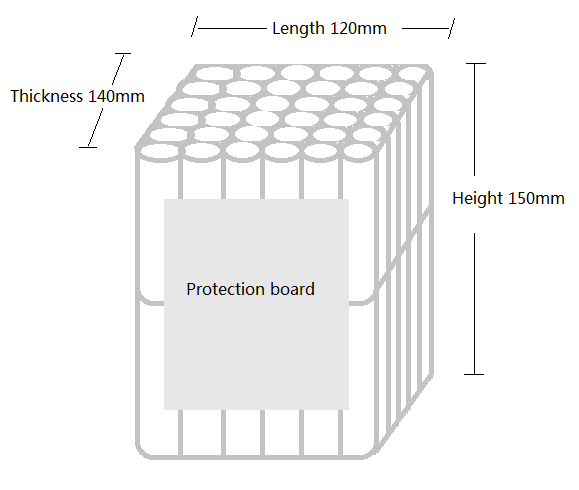
Dimensions: 140x120x150mm

The Installation
Installing the pack required modification to the battery case lid; shaving 2.7 mm off the inside as the lengthwise fit is tight. In the end I got the battery in the nose, sealed as per stock battery. Charging can be done in situ via draw lead, so no need to remove for charging so a big advantage over the stock solution.
The lithium is lighter, so needed about 2kg of lead in the nose. Needs some minor tweaks, but trim is no issue with Delrin x-prop. There is a bit of lead shot in the tail still, but I’m not sure whether this would be enough to trim out a metal x-prop level…Not shown in the picture below, there is a 6mm alloy plate bolted to the casing lid, I think milled out a recess and positioning plates to hold the battery it. A cam strap and good old bungee stops it moving. Weights just cabled tied in, but it’s pretty solid. I’ts a little hacky, but it’ll rarely come out of the nose so I wasn’t fussed about creating a pretty case.


The Electronics
My first dive didn’t go so well…it was like stalling a race car on the front row of the grid. I quickly found out the older Cuda electronics (ESC – side mounted one) does not seem to handle the higher power possible with the new pack. The voltage range is ok, but the higher voltage means higher current and the old controller seems to freak out (stuttered running, loss of power) at speeds 4+. I tested this on another Cuda 400 with the old electronics and it failed in a different way, simply cutting off at speeds 5+.
After discussions with the factory I decided to upgrade to the new programmable Cuda electronics. On paper the advantage is that they’re programmable, but they’re obviously cable of more power throughput. Once installed this bad boy did the trick.
The factory supplied parts leaves the controller exposed on top of the motor guard plate – I didn’t like this. To provide added protection, I used the old motor guard as an electronics guard, and just simply stacked another level on. The upper level Delrin post extensions are 25mm long, and M5x60mm socket head bolts did the trick nicely to clamp it in.
The Experience
It’s early days, but so far it runs like a mean machine. Seems notably smoother and has more thrust than previous Cudas I’ve used with the old electronics (anecdotal observation). My Cuda used to have a very minor slippy/stutter/shaky nature at high speeds with the 400 Nimh and old controller – though now it’s gone and runs on max extremely smoothly. I’ve not changed the default programmed setting on the controller, so the 400 Nimh will just drop in without a problem.
The Costs
Battery: US$815 inc charger (landed in Oz)
Battery Lid: ~$150 or use old one (requires lathe to modify)
Newer Electronics: US$465 (assuming Cuda has old electronics)
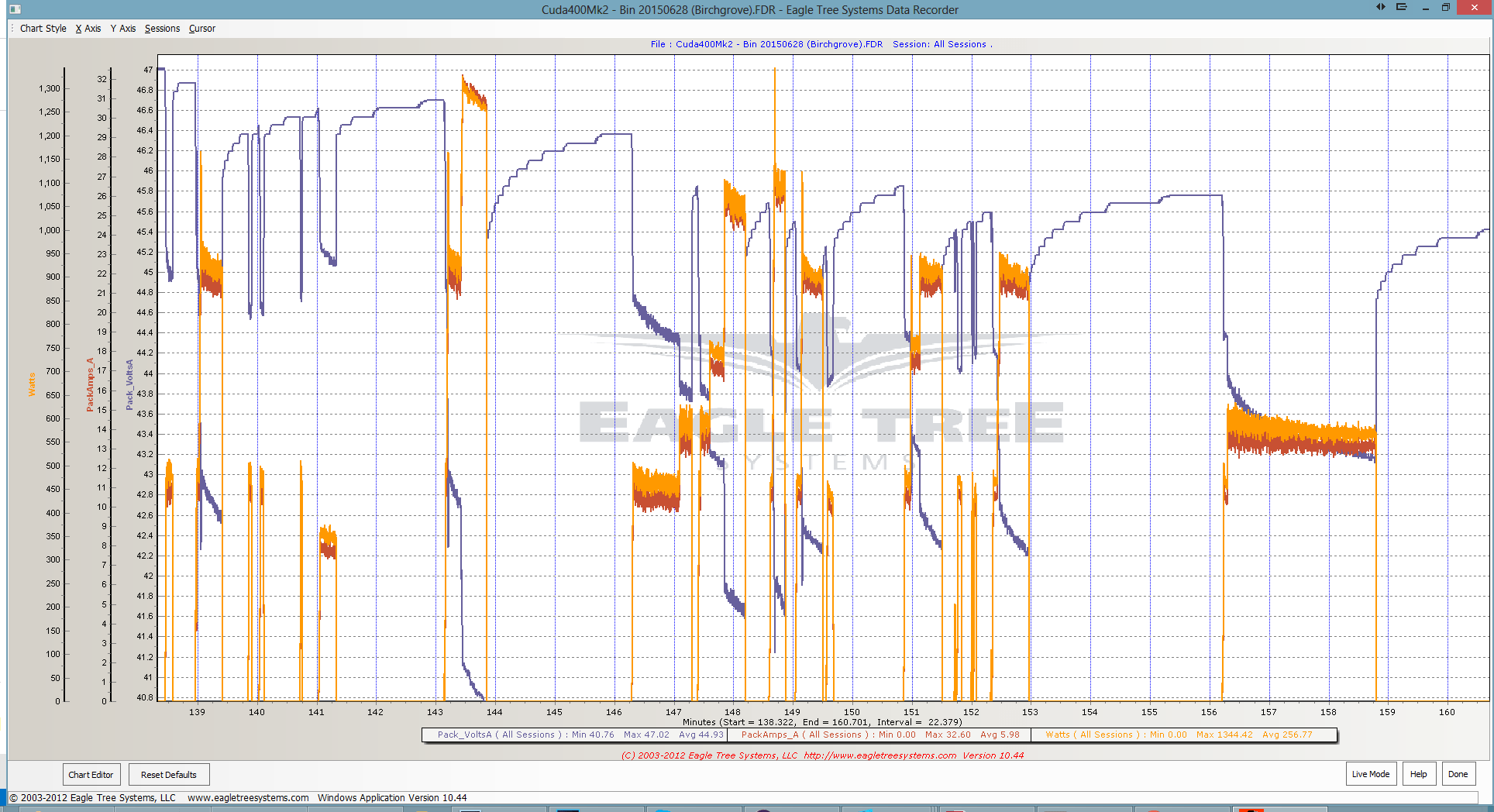
The Data
An Eagle Tree data log of one dive can be found here. I’ll post a full burn down data log file once I get time.